 CN
CN EN
EN JP
JP


新闻活动
夯实物理AI时代3D感知底座 | OPT SuP入选国际顶会CVPR 2026
让机器在复杂场景中稳定理解三维世界—这是3D视觉的底层难题,也是OPT长期深耕的技术命题。

6月3日至7日,第43届国际计算机视觉与模式识别会议(CVPR 2026)在美国丹佛市举行, OPT研究成果— SuP(子云驱动的点云配准方法)成功入选大会Highlight。作为计算机视觉与人工智能领域的的国际顶级学术会议,本届大会共收到16,092篇论文投稿,录用率仅25.42%。OPT论文的入选,既是国际学术界对OPT研发实力的高度认可,也体现了OPT在3D感知底层算法上的持续突破。
点击文末 “阅读原文”,查看论文详情

点云配准,是将不同视角、位置的三维数据精确“拼”到同一空间坐标系的3D视觉关键技术。从多视角拼接、三维重建到工件检测、机器人抓取,都以其为支撑。但在真实工业现场,遮挡、局部扫描、噪声等因素导致机器获取的点云不完整,若对整片点云进行“全局硬匹配”,极易出现错配,导致位姿估计失败。
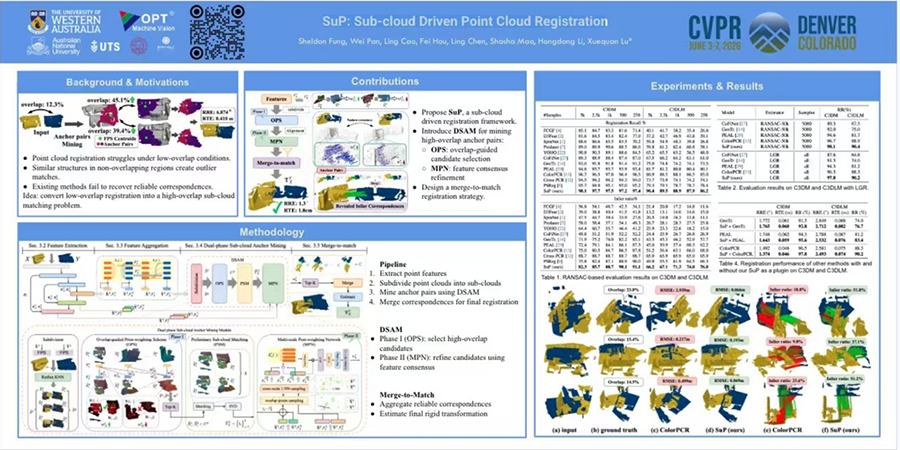
OPT SuP的创新思路是“化整为零”:先筛选出可靠的局部锚点,再通过这些局部线索恢复全局关系,让低重叠点云配准从“碰运气式搜索”升级为“有依据的精准匹配”。这一能力,提升了机器在复杂条件下三维感知稳定性,也是具身智能、智能制造等上层系统实现落地的关键支撑。

伴随具身智能与工业制造的深度融合,人工智能正从“数字AI”迈向“物理AI”。大模型可以理解文字、图片和视频,但要让机器人真正走进工厂、仓库、实验室和家庭,它必须理解真实空间,稳定可靠的3D感知能力正是关键所在。
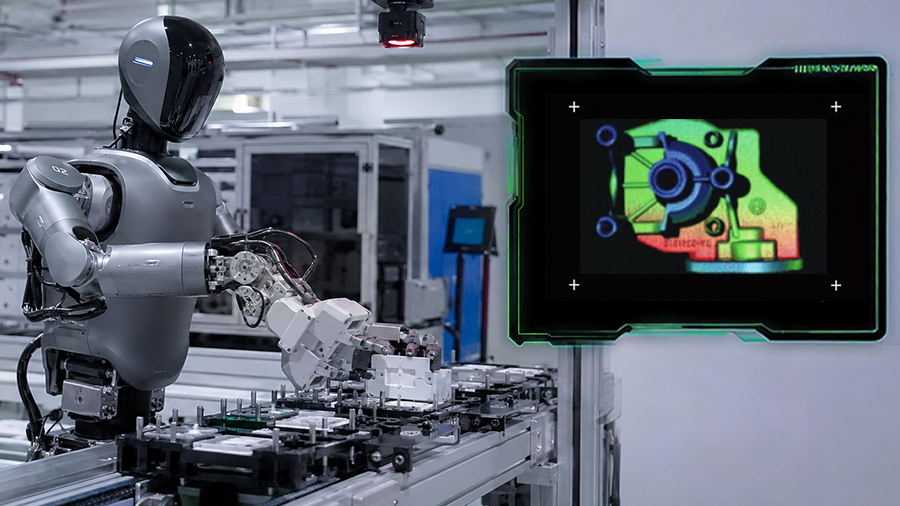
OPT长期深耕工业自动化与机器视觉,服务30多个行业,积累了丰富的真实工业场景经验,并构建了从成像、感知到算法应用的完整技术体系。SuP作为体系中的一项重要成果,面向低重叠、遮挡、杂乱等真实难题,为机器提供更稳健的三维空间理解能力,为工业智造和具身智能应用筑牢感知基础。
从工业检测到三维重建,从机器人操作到物理AI,OPT将持续深耕底层视觉技术,构建面向真实世界的3D感知底座—让机器在复杂环境中,看得更准、理解更深、行动更稳。






 手机请直接输入:
手机请直接输入: 座机前加区号:+86-0769-82716188-251
座机前加区号:+86-0769-82716188-251



